Chamade
Category
design
Date
29/05/2017
About
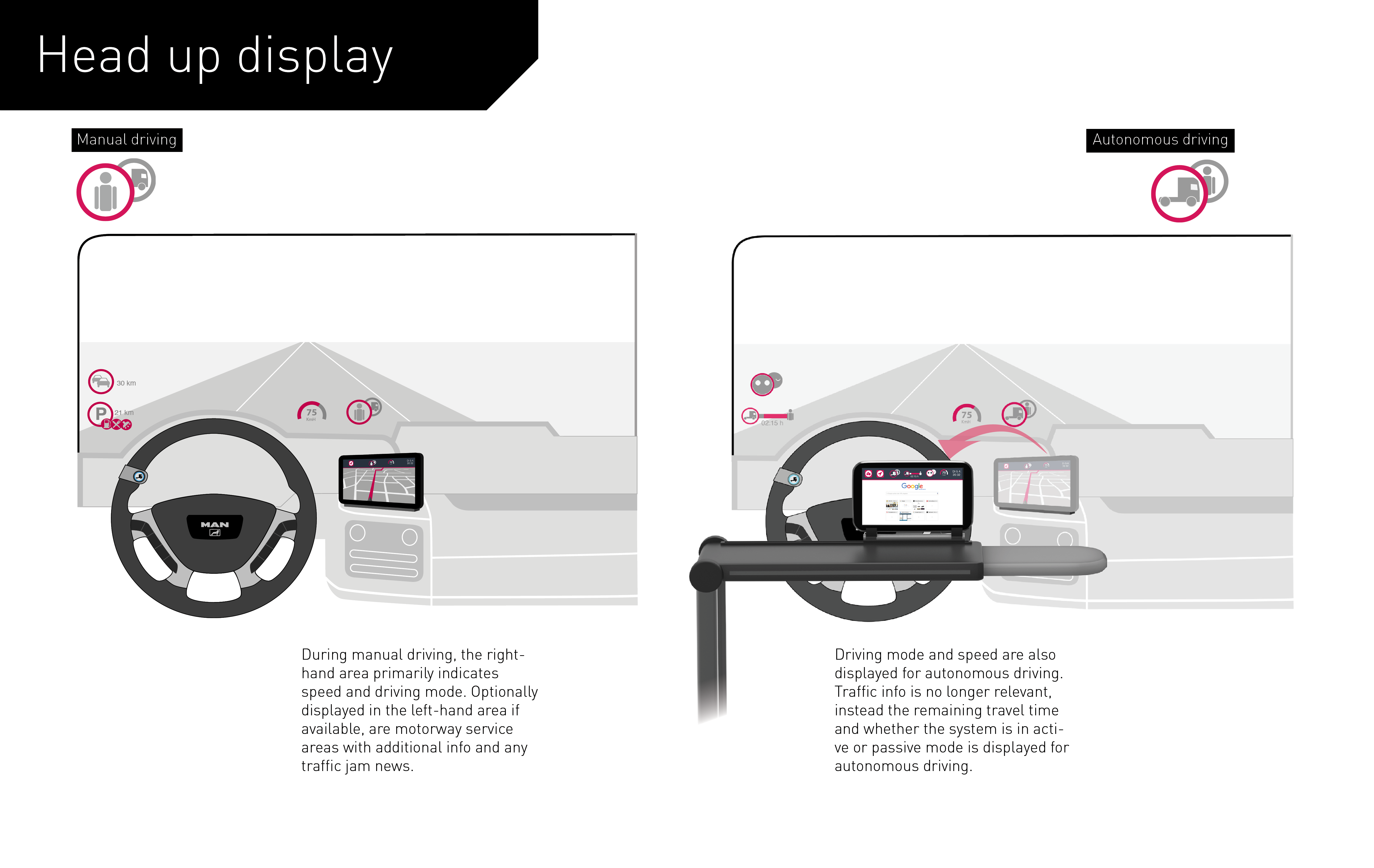
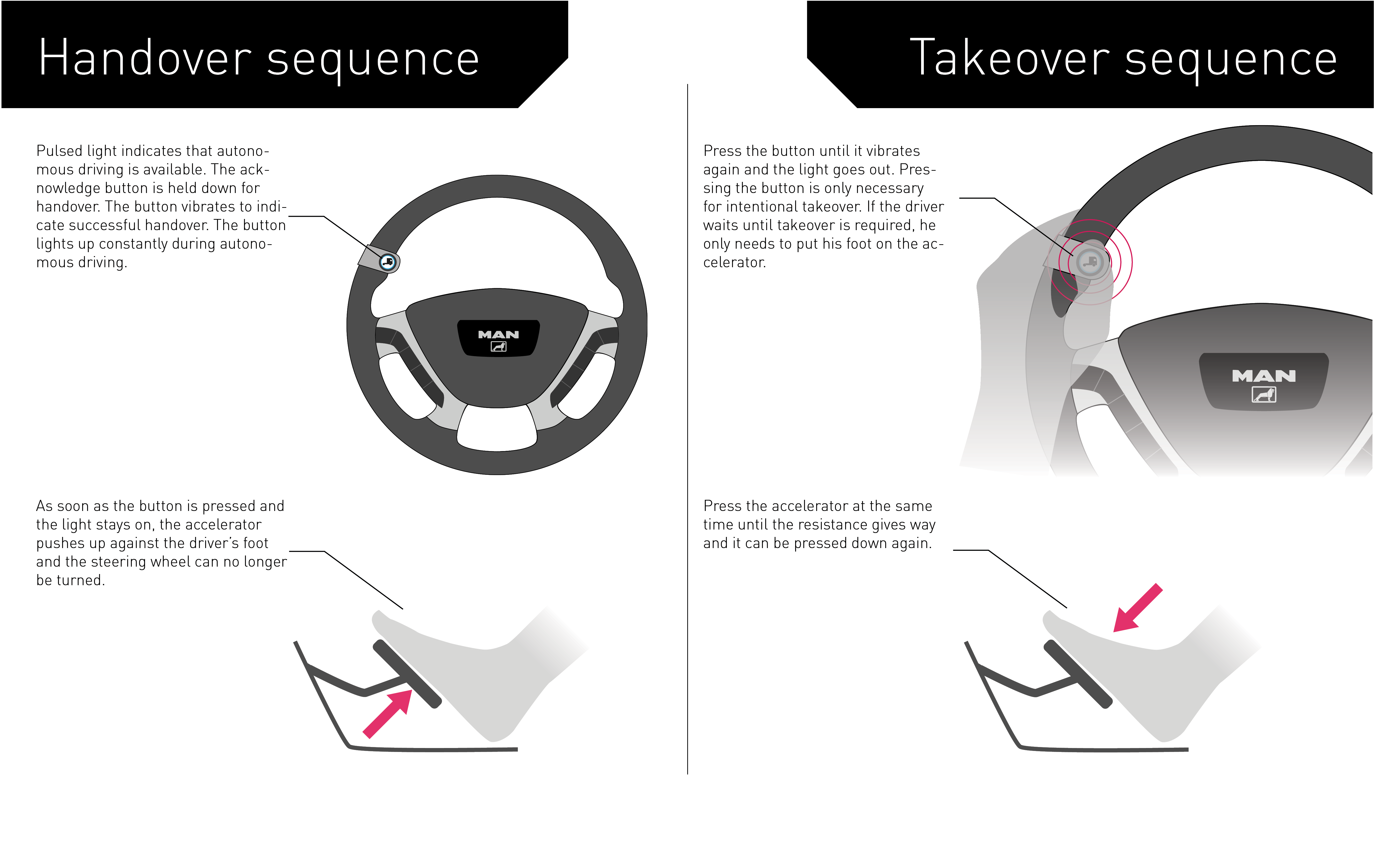
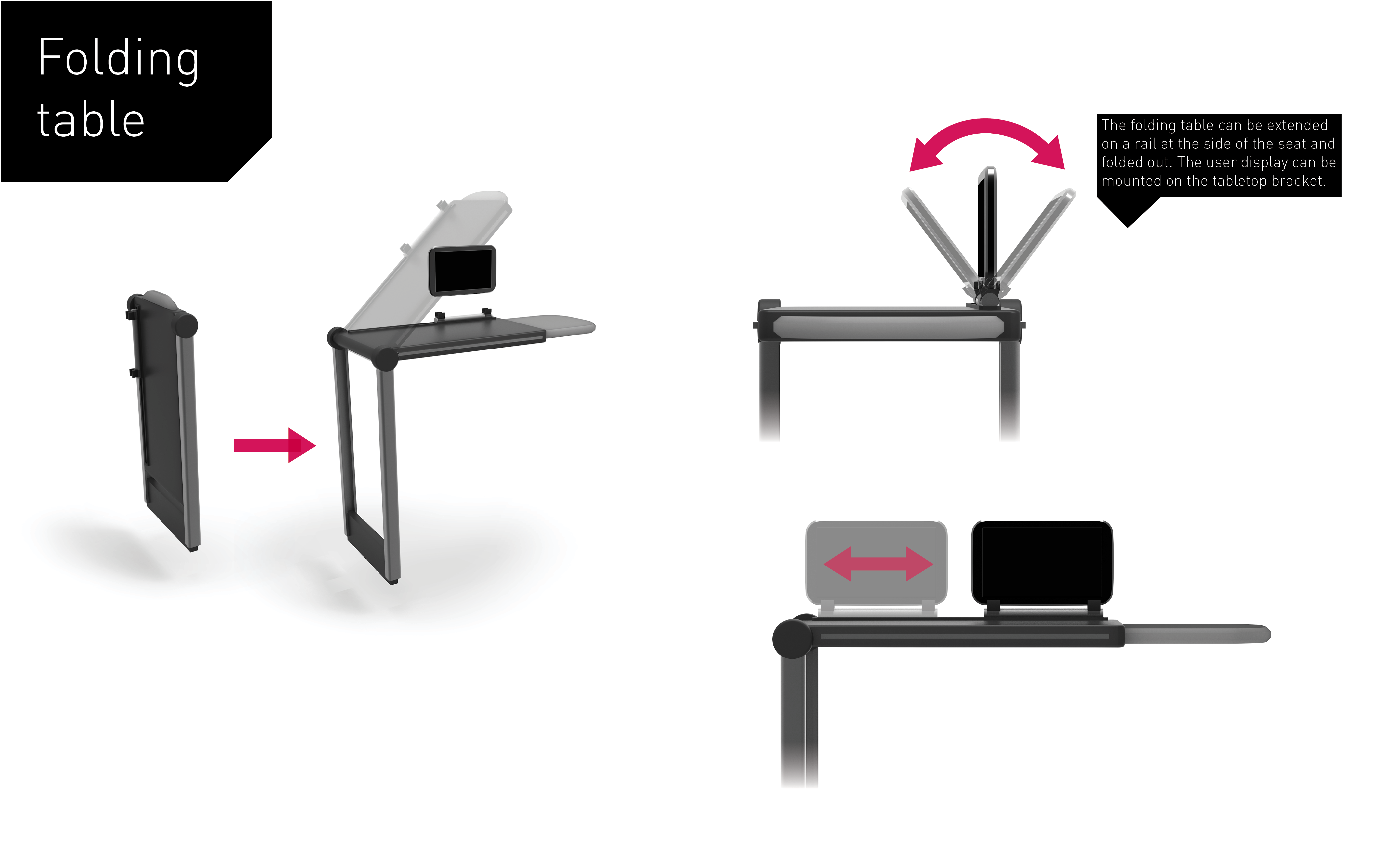
Concept and interface for an autonomous truck drive mode
The brief was to develop an interface for an autonomous truck driving system between level 3 and 4 of autonomous driving. This means that the driver need no longer monitor the system all the time, but also has the option of turning their attention elsewhere. My concept focuses on the driver’s handover to and takeover from the truck. It also addresses the workplace situation after successful handover.
Mentoring: Prof. Marion Kießling